

MITCHELL CLAPPERTON
he/him | age 16 | Hamilton, ON
Gold Medal Project, Bay Area Science & Engineering Fair 2021 | Arcelor Mittal Dofasco Engineering Award | Dillon Consulting Science & Engineering Award | Gowling Innovation Award | Grand Winner, American Meteorological Award | Silver Medal, Canada-Wide Science Fair | Innovation Award | Canadian Association of Physicists Award
Edited by Tristan Montoya
INTROduction
Boat wakes can have significant negative impacts on the ecosystems of lakes and oceans. The powerful forces generated by recreational boat wakes cause erosion of shorelines, generate harmful turbidity in the water, and threaten aquatic animals who nest, spawn, or live near the shoreline (Shuster et al., 2020). In addition, wakes can also threaten people and property. Docks, canoes, kayaks, swimmers, downed skiers, and even other boats can be put at risk by large boat wakes.
A wake consists of waves that propagate out from the sides and back of a boat in motion (Bright Hub Engineering, 2010). Because water cannot be compressed under normal conditions, a boat under power must push aside water to make way for the boat itself. Wave theory states that the energy in a wave is proportional to the wave height squared (United States Naval Academy, 2020). As a boat picks up speed, the size of its wake increases. If the wake doubles in height, there is a resulting four-fold increase in wake energy. Improving the efficiency of hull designs means less fuel will be wasted needlessly and smaller wakes will be generated.
With over 8.6 million recreational boats in Canada alone, the cumulative impacts of boat wakes are a major environmental concern (National Marine Manufacturers Association Canada, 2016). This project aims to create a solution for mitigating wakes through the application of computational fluid dynamics (CFD) to the development of a wake simulation model and the engineering design of a wake mitigation device.
BACKGROUND
Waves generated by boats are monochromatic, which means they travel in a well-defined direction without significant spreading. Natural waves are irregular in nature, which means they are not as collated and dissipate much faster. For example, if a 1-foot-tall irregular wave dissipates to one quarter of its height within 500 feet, a comparable boat-generated wake of the same height and wavelength will not dissipate to a quarter of its height until it has travelled 900 feet (Boshek, 2018). This illustrates the need to understand the science involved in the generation of boat wakes so that steps can be taken to minimize their size and the damage they can cause.
METHODS & MATERIALS
The project began with an investigation of boat wake physics and potential reduction solutions. Given that attempts at boat driver education and behavioural changes have been broadly applied with limited success, a technical solution to mitigate wake height applied directly to recreational boats was the preferred methodology.
Given that it would be difficult, expensive, and time-consuming to perform full-scale tests to measure wake heights, a method was needed to model the wake output of a boat with and without a wake mitigation device attached to it in order to evaluate the effectiveness of such a device. After significant investigation, the free surface flow tool introduced in the 2018 version of the SolidWorks Flow Simulation CFD package was chosen to perform this task. A wake simulation model was then developed to simulate a boat moving through water at a variety of fixed speeds. This simulation was operated more than one hundred times with a variety of parameters to analyze and quantify the water displaced by a boat and to evaluate the effectiveness of a wake mitigation device. Some of the important parameters included the boat dimensions (30 cm long, 10 cm beam, 7.5 cm high), the extent of the flow domain relative to the boat (50 cm forward, 100 cm behind, 20 cm on each side, 25 cm up, 10 cm down), and the analysis options used for the free surface flow model (air/water interface with standard gravity). The flow domain is pictured in Figure 1.
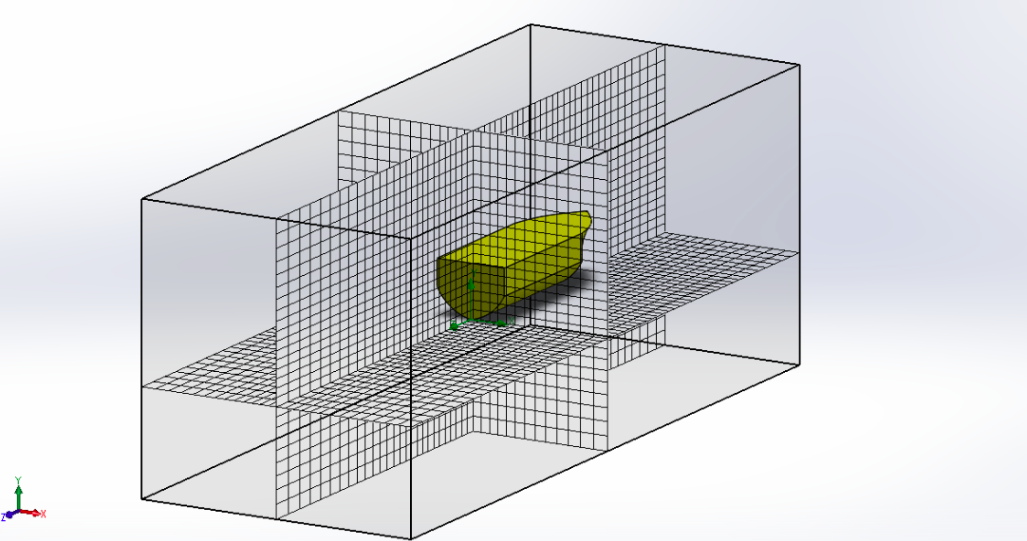
Figure 1: Computational Domain
Running the initial simulations and analyzing the pressure plots made it clear that the majority of the wake height was a result of pressure on the hull creating a significant bow wave. Based on this observation, it was decided to explore an adaptation of the “bulbous bow” used on cruise and merchant ships to create a secondary wave to destructively cancel the vessel bow wave, resulting in a reduced wake height (Chakraborty, 2020).
Experimental CFD models were designed to test the effectiveness of various wake mitigation device shapes, sizes, and locations. After a number of additional tests, and with limitless possibilities to evaluate, it was decided to concentrate on a sphere shape, mounted in front of the bow. Several further simulations were run to determine the optimal sphere size and location under various boat operating conditions. At low speeds, boats of this nature operate in displacement mode and sit low in the water. Once sufficient forward speed is attained, these boats achieve “plane” and ride mostly on top of the water. To be efficient, a spherical wake mitigation device would, at a minimum, need to change vertical position to remain optimally placed in the water during both displacement and plane operating modes. Further experimentation also revealed that the sphere operated most effectively at different distances in front of the boat at different speeds. This relates to the change in wavelength of the transverse wake waves as the boat speed changes.
These observations led to the conclusion that an actively positioned sphere that could be moved vertically (up or down) and horizontally (closer to or farther from the bow of the boat) would be efficient across a range of operating conditions. Figure 2 shows the “proof of concept” active wake mitigation device which would be able to position the sphere at optimal locations based upon boat operating conditions.

Figure 2: Wake Mitigation Device Proof of Concept
RESULTS
All simulations were performed on a scale model boat 30 cm in length, 10 cm in width, and 7.5 cm in height. According to the work of William Froude, a British engineer, scale model testing is a valid method that can be scaled up to represent full size vessels. However, when model results at a given speed are scaled up to a full-size boat, they are valid at a different full-size boat speed. Froude’s “Law of Comparison” gives us the tool to calculate the equivalent full-size boat speed (United States Naval Academy, 2020) as:

where VS is the ship velocity (ft/s), VM is the model velocity (ft/s), LS is the ship length (ft), and LM is the model length (ft). The model boat in this report was based on a 14-foot fishing boat operating at 15 knots. This fishing boat would therefore need to be operated at 56.5 knots in order for the actual results to correlate to the scale model results.
Three different types of simulations were run with consistent parameters, speeds, and draft depths using SolidWorks software. Pressure plots were used to determine the distribution of forces on the boat bow and active wake mitigation device (see Figure 3). Free surface flow simulations were used to determine the wake output of the boat with and without the mitigation device attached. Time-dependent simulations were then used to study the development of the wake as the boat accelerated from idle position to full speed (see Figure 4).

Figure 3: Boat pressure plots
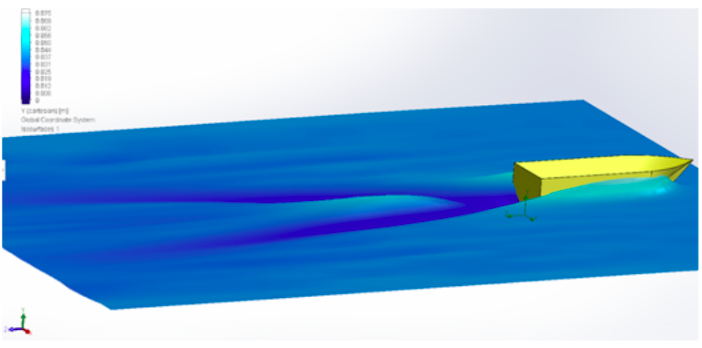
Figure 4: Wave development simulation
The graph in Figure 5 shows that different sphere sizes are most effective at different distances from the bow at a given speed. Steady-state simulations were run at a variety of speeds, and 15 knots was chosen because it produced significant wake heights. At 15 knots, for example, a sphere diameter equal to 20% of the boat beam was found to result in a maximum wake reduction of 24%. Since the energy in a wake is proportional to the square of the wake height, this equates to an energy reduction of 42%. The optimal sphere distance in front of the bow was dependent on the sphere size chosen and the boat speed. As shown in Figure 5, at a speed of 15 knots, a 40% sphere size was most effective closer to the boat, while a 20% sphere size was most effective farther from the boat.

Figure 5: Wake height measurements
discussion
Solving the wake problem will involve a combination of solutions that are both behavioural and technical. From a behavioural perspective, driving at an appropriate speed, accelerating and decelerating slowly, and staying far from the shore where possible are all key factors, and many organizations such as Safe Quiet Lakes are already working on better educating drivers. While behavioural changes are key, engineering improvements that do not rely on people changing their habits are more likely to affect widespread and lasting change. Designing all future boat hulls in a more efficient manner so they create less wake will set a new standard and ensure each new boat that is put on the water will be more eco-friendly. Developing a wake mitigation device that is cost-effective, easy to retrofit, improves fuel economy, and reduces wake generation will go a long way toward reducing the wake damage that the more than 8 million boats on Canadian waterways inflict each year.
FUTURE STEPS
Next steps for this project would include refinement to both the wake simulation model and the wake mitigation device. First, the simulation model could be refined to add complexity. The model primarily describes wakes in two modes – displacement and planing – which comprise the majority of the boat’s operation. A more sophisticated model would also incorporate the transition phase in acceleration and deceleration mode, as transitions create wake pulses that are short lived but highly destructive while getting up on or coming down from plane.
A new computer purchase would be a significant upgrade in that it would allow the calculation time to be reduced, as the runtime for each simulation is currently approximately 40 minutes. This would allow several more iterative simulations to be run to further refine optimal design considerations.
Next, building on the existing wake mitigation device design, many additional simulations could be run to further refine and optimize the device sizing and location, to see if the 42% wake energy reduction currently achieved could be further improved upon. Once the optimal design configuration has been determined, a scale model should be built and tank tested to verify the modelling predictions. Once verified, a full-scale prototype should be built and field tested.
CONCLUSION
From this project, three conclusions have been drawn. 1) Free surface flow modelling is an excellent time- and cost-effective tool for running multiple simulations to analyze the wakes produced by a boat with various wake mitigation device configurations in order to determine an optimal design. 2) The wake mitigation device designed here reduced wake size by 24% and wake energy by 42% when adapted to the small boat used in this modelling experiment. 3) An active wake mitigation device that can position a sphere at different heights and distances from the bow could be very effective in reducing the wake height produced by small, recreational boats.
ACKNOWLEDGEMENTS
I would like to thank several people for their assistance with my project. These include Dr. Steve Shelestensky for sharing his expertise in computational fluid dynamics, Stan Altoft for sharing his knowledge of boat design with me and for his technical review, as well as Safe Quiet Lakes for sharing their wake research and for all of the advocacy work that they do to prevent wake damage.
REFERENCES
Chakraborty, S. (2021, December 6). What's the importance of bulbous bow of ships? Marine Insight. Retrieved November 15, 2022, from https://www.marineinsight.com/naval-architecture/why-do-ships-have-bulbous-bow/
Boshek, M. (2018, June 26). Don’t wake me: How to design for boat traffic. Marina Dock Age. Retrieved November 15, 2022, from https://www.marinadockage.com/dont-wake-design-boat-traffic
Hull designs that minimize wake. (2010, August 11). Bright Hub Engineering. Retrieved November 15, 2022, from https://www.brighthubengineering.com/naval-architecture/81960-minimizing-wake-by-hull-design/
National Marine Manufacturers Association Canada. (2016). The Impact of Recreational Boating in Canada: 2016.
Shuster, R., Sherman, D. J., Lorang, M. S., Ellis, J. T., & Hopf, F. (2020). Erosive potential of recreational boat wakes. Journal of Coastal Research, 95(sp1), 1279-1283. Retrieved from https://doi.org/10.2112/si95-247.1
United States Naval Academy. (2020, June). Chapter 7: Resistance and Powering of Ships [PDF]. EN400: Principles of Ship Performance Course Notes. Retrieved from https://www.usna.edu/NAOE/academics/en400.php
ABOUT THE AUTHOR

Mitchell Clapperton
Mitchell Clapperton is a Grade 12 Student at Westdale Secondary School in Hamilton. He is a four time gold medalist at the Bay Area Science and Engineering Fair, and a three time medalist at the Canada Wide Science Fair. An aspiring engineer, he is passionate about CAD and is pursuing his SolidWorks professional certification.
Mitchell founded the Westdale STEM Club to engage more people in STEM. In his spare time, he is active in sports and is a volunteer coach with the Special Olympics.